Innovatice Design & Engineering Applications Lab.
- Chu, Won-Shik Professor
- 서울대학교 공학박사 기계공학 전공
- wschu@gnu.ac.kr
혁신 설계 및 공학 응용 연구실(IDEA Lab.)은 다양한 공정을 기반으로 공학적 응용을 위한 '설계 및 제조기술'을 연구한다. 재료의 물리적 특징, 표면 특성, 패턴 구조 등을 활용하여 다양한 형태의 구동기 제어에 대한 연구를 수행하고 있으며, 4차 산업혁명의 중심이 되는 스마트 공장에서의 지능형 제조 시스템에 대한 연구를 수행하고 있다.
- Research Keyword정밀가공, 3D프린팅, 하이브리드 가공, 소프트 로봇, 소프트 구동기, 레이저 가공, 공작기계, 생산시스템, 제조공정
- Industry-Academic산업기계, 생산 자동화, 정밀자동, 공정 개발, 스마트 공장, 소프트 로봇, 구동기
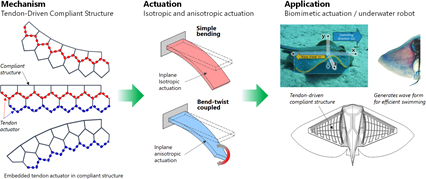
연성 구동기(soft actuator 연구)
- 구동기(soft actuator) 연구
- 연성구동기는 다양한 모드의 구동뿐만 아니라 부드러운 움직임을 가능하게 할 수 있는 장점이 있음
- 대기중에 비해 상대적으로 저항이 큰 수중 환경에서 작동해야하는 수중로봇의 효율적인 유영이 가능하도록 함
- 크기에 제한없이 복합적인 3차원 움직임을 필요로 하는 부분에 활용이 가능
- 로봇을 제작 할 경우 실제 생물에 더 가까운 움직임을 모사 할 수 있으며, 다양한 분야(환경, 재난, 생태관찰 등)에 활용이 가능
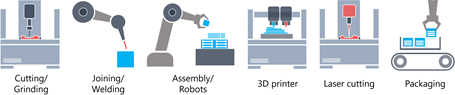
스마트 공장에서의 제조공정
- 스마트 공장에서의 다양한 생산공정 및 이와 연관된 생산성, 품질 향상 및 유연성을 향상시킬 수 있음
- 스마트 공자에서의 로봇의 활용과 로봇 그리퍼 개발을 통한 지능형 제조 시스템
Research
- 생체 모사 수중 로봇용 힘줄구동 유연구조 액추에이터, 2019.03 ~ 2022.02(3년), 300,000,000원 책임
- 스마트 구동기를 이용한 소프트 수중 로봇 개발, 2016.11 ~ 2019.10(3년), 150,000,000원 책임
- 소재부품장비 스마트촉진 인력양성사업, 2019.10 ~ 2020.06, 160,000,000원 참여
- 산업위기지역 미래 자동차 핵심부품개발사업, 2019.04 ~ 2021.12. 600,000,000원 참여
- 고용안정 선제대응 패키지 지원사업 285,805,000원 2020.07 ~ 2020.12 참여
Work Experience
- 2012 ~ 2018 연구교수, 서울대학교, 정밀기계설계공동연구소
- 22011 ~ 2011 박사후 연구원 Starford University
- 22011 ~ 2011 박사후연구원 Univeristy of Rexas at Huston
- 22010 ~ 2011 박사후연구원 Brigham and Woman's Hospital & Harvard Medical School
최근 업데이트 일시 : 2023/09/13 16:32:11